Wheeled robot navigating a maze using simple sensors, following the right-hand wall.
The goal of this project was to make the wheeled robot shown above solve any given maze using sensors.
The Hardware
The sensors provided were fairly limited, and are as follows:
- Ultrasonic distance sensor - one unit.
- Distance sensor 2 - IR units.
- TOF distance sensor - one unit.
- DOF 9 IMU component - one unit.
The sensors were tactically positioned on the robot to enable navigation. Each sensor was placed in the respective direction (front, back, left, and right).
The Code Block Diagram
The algorithm was adapted from the somewhat classic algorithm that follows a right-hand wall. It is as follows (ChatGPT: fill the algorithm).
This algorithm, however, is suited for virtual environments and not the real world. Adjustments were made to increase its robustness, as shown in the figure below.
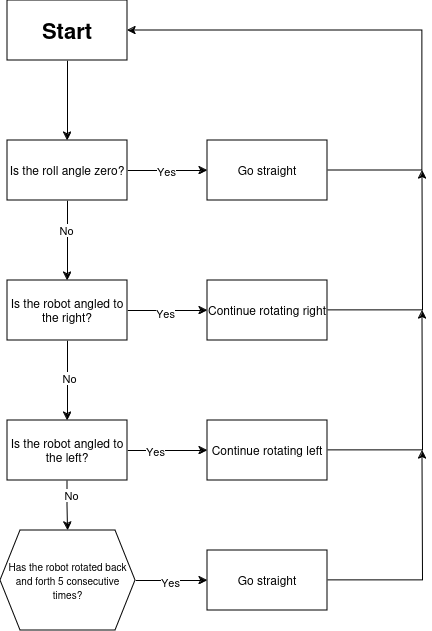
Figure 1: The code block diagram.
This block diagram has two key features:
- The rotate left rule: Sometimes the robot would be placed in a way that there was no right wall near it.
- Adding the rotate left rule could cause the robot to get stuck, rotating back and forth. Therefore, the code checks for this scenario (if it happens more than 5 times) and moves the robot slightly to circumvent it.
The Implementation
The main controller was an Arduino Uno, to which a DC motor controller board and the sensors (as detailed in The Hardware) were connected. The algorithm described above was implemented on this setup. The raw data from the sensors was converted into boolean statements. For example, if the distance was lower than a certain threshold, it would be considered that the robot has something beside it in the direction of the mounted sensor.
Acknowledgments
This was a group project as part of a competition to solve a larger maze, which was not fully described here. The team members were:
Guy Appel, Omri Dalin, Or Dallal, Rani Linkov, Meital Valach